extensions
Robot Operating System Extension Concept
For help on how to use an App Inventor extension, please see this extensions guide.
Notes
This documentatin is for an exntension that is currently a work in progress and not available for download at this time.
Description
This extension will allow users to interact with a Robot Operating System (ROS) node. To start, this extension will allow the user to move a robot using the twist message.
Functions Concept

Connects the application to the ROS master node at the URI address.
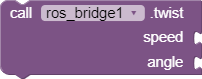
Sends a twist message to the ROS master node. The arguments tell the robot how fast to move and turn in which dimension.
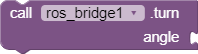
Sends a twist message to rotate the robot.

Sends a twist to tell the robot to stop moving in all directions.

Sends a twist to tell the robot to move forward indefinitely. The arguments tell the robot how fast to move.

Sends a twist to tell the robot to move backwards indefinitely. The arguments tell the robot how fast to move.

Sends a twist to tell the robot to spin clockwise indefinitely. The arguments tell the robot how fast to spin.

Sends a twist to tell the robot to spin counter-clockwise indefinitely. The arguments tell the robot how fast to spin.
Developer Documentation
More in-depth information for developers can be found here.
Download
A non-functioning extension file can be found here
Authors
This extension was originally created by George Colgrove (lead developer), Guilherme Lopes Dias, Ryan Connors, and Nathan Oesterle